Lab 05 - Laboratoria problemowe 1
Lab. 05 - Laboratorium problemowe 1 - “Robot poszukujący”

1. Laboratoria problemowe
W ramach laboratorium problemowego stawiany jest przed Państwem problem, zagadnienie, które wymaga pracy własnej, szukania rozwiązań, kreatywnego podejścia.
Efektem tego laboratorium nie musi być rozwiązanie problemu. Skupiamy się tutaj na możliwych podejściach, rozważaniu co może zadziałać a co nie zadziała, jakie potencjalne problemy możemy napotkać.
Wynikiem końcowym ma być krótki raport (wiecej na dole instrukcji) oraz ewentualnie program realizujący rozwiązanie problemu. Raport będzie oceniany jak standardowe zadanie domowe, natomiast za implementację możliwe jest do uzyskania dodatkowo do 5 punktów.
2. Problem
Dany jest robot TurtleBot3 typu waffle. Robot funkcjonuje w środowisku z gotową mapą, jest się w stanie w nim lokalizować. Jest wyposażony w skaner laserowy o zasięgu 3,5 metra oraz kamerę RGB.
W środowisku, po uruchomieniu, umieszczane są, w 5 losowych punktach (z góry zdefiniowanej puli z drobną wariancją), kostki z tagami ArUco (ze słownika ARUCO_ORIGINAL). Zakładamy, że robot nie zna przybliżonych położeń kostek.
Robot ma autonomicznie przeszukiwać środowisko i lokalizować położenie wszystkich 5 kostek wraz z ich ID.
Zadanie powinno być realizowane jako akcja, gdzie wynikiem jest pozycja wszystkich kostek.
3. Przygotowanie środowiska
Przed przystąpieniem do pracy należy przygotować środowisko: Instrukcja przygotowania środowiska do zajęć.
Domyślnie kontener nosi nazwę ARM_05.
UWAGA! Skrypty po uruchomieniu usuwają kontener o takiej nazwie przed utworzeniem nowego.
Korzystanie z kontenera
Po każdym ponownym uruchomieniu komputera, proszę pamiętać o wywoływaniu:
xhost +local:rootNowy terminal można dołączyć do kontenera korzystając z polecenia:
docker exec -it ARM_05 bashROS_DOMAIN_ID
W przypadku pracy na wielu komputerach w tej samej sieci lokalnej
(eduroam też może tego wymagać), konieczne może być ustawienie
zmiennej środowiskowej ROS_DOMAIN_ID na różnych
wartościach. Należy wybrać dowolną liczbę całkowitą z zakresu 0-100.
Wartość tę należy ustawić w pliku ~/.bashrc:
export ROS_DOMAIN_ID=10 # przykładowa wartośćlub bezpośrednio w terminalu (wtedy będzie obowiązywać tylko w tym terminalu):
export ROS_DOMAIN_ID=10 # przykładowa wartośćSugerowane jest użycie dwóch ostatnich cyfr numeru IP komputera jako
wartości ROS_DOMAIN_ID, aby uniknąć konfliktów z innymi
użytkownikami w sieci. Aby sprawdzić swój adres IP, można użyć
polecenia:
ip addr showadres IP będzie widoczny przy interfejsie sieciowym, np.
wlan0 lub eth0.
Wygodne może być dodanie tego exportu do bashrc:
echo 'export ROS_DOMAIN_ID=<wybrana_wartość>' >> ~/.bashrc 4. Uruchomienie symulacji
W tej instrukcji będziemy ponownie wykorzystywać robota TurtleBot3
(waffle), tym razem w świecie arm_house.world z paczki
arm05_sim. Można ją uruchomić poleceniem
cd /arm_ws
source install/setup.bash
ros2 launch arm05_sim world.launch.py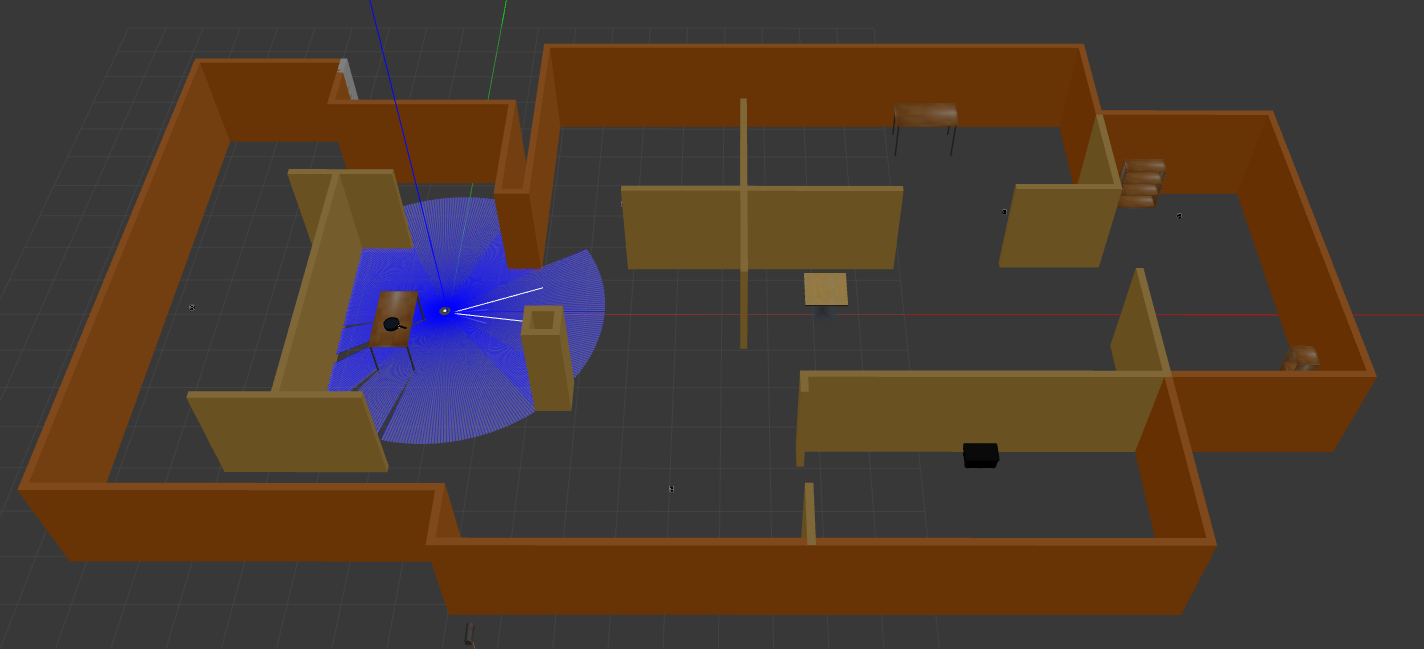 ^
Zdjęcie zdezaktualizowanej wersji symulacji - obecna wersja może się
różnić.
^
Zdjęcie zdezaktualizowanej wersji symulacji - obecna wersja może się
różnić.
Pierwsze uruchomienie może trochę potrwać, wymagana jest odrobina cierpliwości.
Podczas uruchamiania w losowych miejscach są spawnowane kostki ArUco (pokazane poniżej). Za każdym razem będą one w innym położeniu. Kostka jest sześcianem o boku 9 cm.
Po uruchomieniu symulacji, pozycje kostek są zapisywane w folderze
/root/.ros/arm05_sim/logs. Nazwy plików to sygnatury
czasowe, ale zawsze ostatnie uruchomienie jest zapisywane w pliku
latest.txt. W ten sposób można sprawdzić dokładność
działania proponowanego systemu.
5. Zadanie do samodzielnej realizacji
W ramach zajęć należy zaproponować sposób rozwiązania problemu postawionego w punkcie 2.
Efektem ma być przygotowanie raportu, który będzie zawierał proponowaną strukturę programu (wraz z node’ami i topicami, które będą one wymieniać), paczki z sieci, które można wykorzystać do realizacji zadania oraz opis potencjalnych problemów, na które można napotkać.
Raport powinien mieć następujące elementy:
- Cel i założenia – krótki opis problemu oraz przyjętych ograniczeń.
- Strategia działania – najważniejsze kroki algorytmu oraz podział odpowiedzialności między node’ami.
- Schematy i diagramy – diagramy blokowe, diagramy przepływu danych między node’ami itp.
- Wykorzystane narzędzia – biblioteki, paczki ROS2 i inne zasoby zewnętrzne.
- Potencjalne ryzyka – spodziewane trudności, sposoby ich weryfikacji lub obejścia.
- Wnioski – podsumowanie, możliwe kierunki dalszego rozwoju.
Program
Opcjonalnie, można również przygotować program realizujący postawione zadanie (wraz z jego opisem w ramach raportu). Za implementację można otrzymać dodatkowo do 10 punktów.
Autor: Kamil Młodzikowski